What fundamental concept defines the bedrock of modern Inertial Navigation Systems (INS) that utilize gyroscope stability?
Using a fixed reference plane in space to measure movement relative to it, often via dead-reckoning.
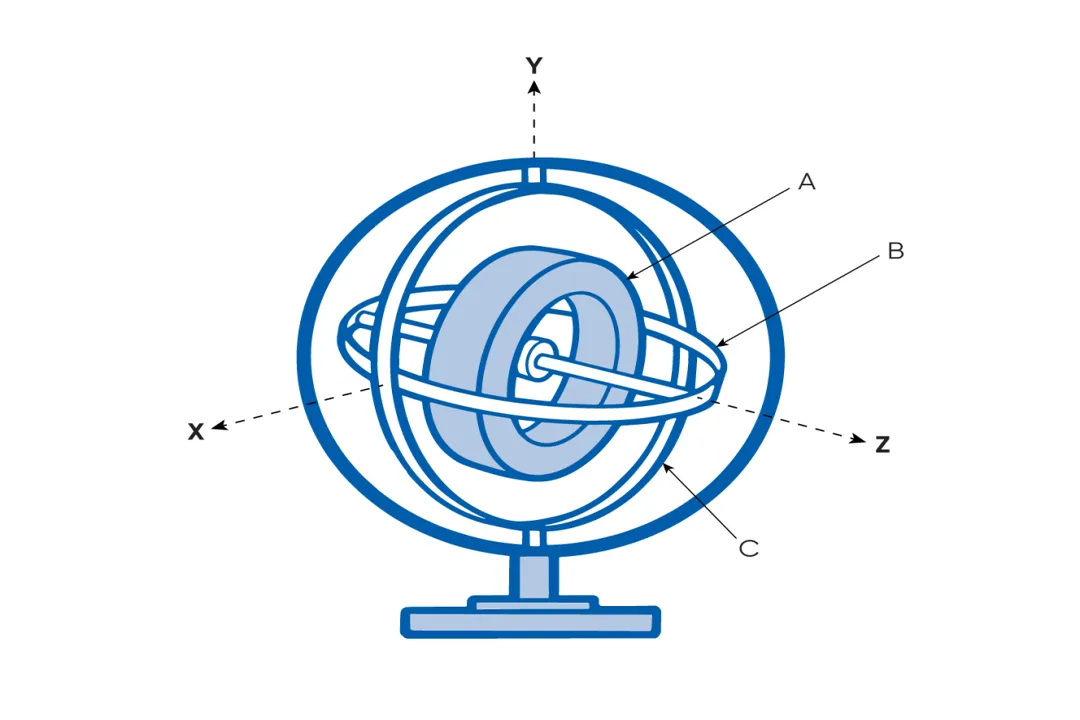
The transition of the gyroscope from maintaining direction to measuring motion is encapsulated by the foundational concept behind modern Inertial Navigation Systems (INS). INS relies on the perfect spatial stability provided by the gyroscope assembly, which establishes a fixed reference plane independent of external forces or satellite signals. When Global Navigation Satellite System (GNSS) signals are lost, the INS takes over using dead-reckoning, which involves continuously integrating the acceleration and rotation data supplied by its internal gyroscopic and accelerometric sensors to calculate the vehicle's current velocity and position relative to that fixed reference frame.