Where did the gyroscope come from?
The fascination with an object that refuses to fall over, even when coaxed, is clearly ancient. Before anyone conceived of the word gyroscope, the simple physics toy—the spinning top—held sway over human curiosity, from the young to the intellectually inclined. [3] This seemingly gravity-defying act, where a fast-spinning object maintains balance even on an inclined surface, provided the fundamental observation that would eventually seed an entire field of instrumentation. [3] The early explorations often involved taking a simple flat disc, affixing a pin through its center, and watching how increasing the disc’s mass, particularly concentrating it toward the edges, and boosting the rate of spin extended the brief moment of impossible balance. [3] This basic phenomenon, the inherent resistance to changing orientation due to stored angular momentum, was the conceptual seed. [3]
# Etymology Root
The formal identity of this instrument arrived later, and its name itself reveals its purpose. The term gyroscope originates from Ancient Greek, combining gŷros, meaning "a circle" or "round," with skopéō, meaning "to look". [2] This combination—to look at a circle or rotation—was cemented in 1852 by the French mathematician Léon Foucault. [2][4] Foucault assigned the name specifically during an experiment designed to visually confirm the rotation of the Earth. [2][4] The device, in Foucault’s demonstration, showed the Earth turning beneath it for nearly ten minutes before friction finally brought the rotor to a stop. [2] The word gyroscopic followed soon after in 1869. [4]
# Early Curiosities
While Foucault gave the device its name, the fundamental concept of enclosing a spinning mass to study its behavior predates him by over a century. [2] One of the first documented apparatuses resembling a functional gyroscope was devised by John Serson in 1743, referred to as the "Whirling Speculum." Serson intended this device not for physics theory, but as a practical level to help locate the horizon in foggy or misty conditions. [2]
The scientific examination of the spinning wheel truly began to formalize in the early nineteenth century. Johann Bohnenberger in Germany is credited with producing the first instrument used more like a modern gyroscope, which he initially called his "Machine," writing about it in 1817. [2] Bohnenberger’s design employed a massive, rapidly rotating sphere. [2] A few years later, in 1832, American scientist Walter R. Johnson created a similar setup, but based his work on a rotating disc. [2] It was the attention garnered by Bohnenberger’s machine, which the mathematician Pierre-Simon Laplace saw as a valuable teaching aid at the École Polytechnique in Paris, that brought the concept to Foucault’s attention. [2]
What is telling about this early period is the distinct shift in intellectual focus. Bohnenberger and Johnson were interested in demonstrating principles—the behavior of a rotating massive body suspended in space. [2] Their work was exploratory physics, observing what happened when the orientation of the mounting changed relative to the spinning element. [3] Foucault, however, took this proven apparatus and immediately aimed it at a larger geophysical question: proving the rotation of the planet. This subtle shift in intent, moving from observing rigidity in space to applying it to Earth dynamics, marked the transition of the gyroscope from a mere laboratory curiosity to an instrument of direct scientific consequence. [2]

# Framing Motion
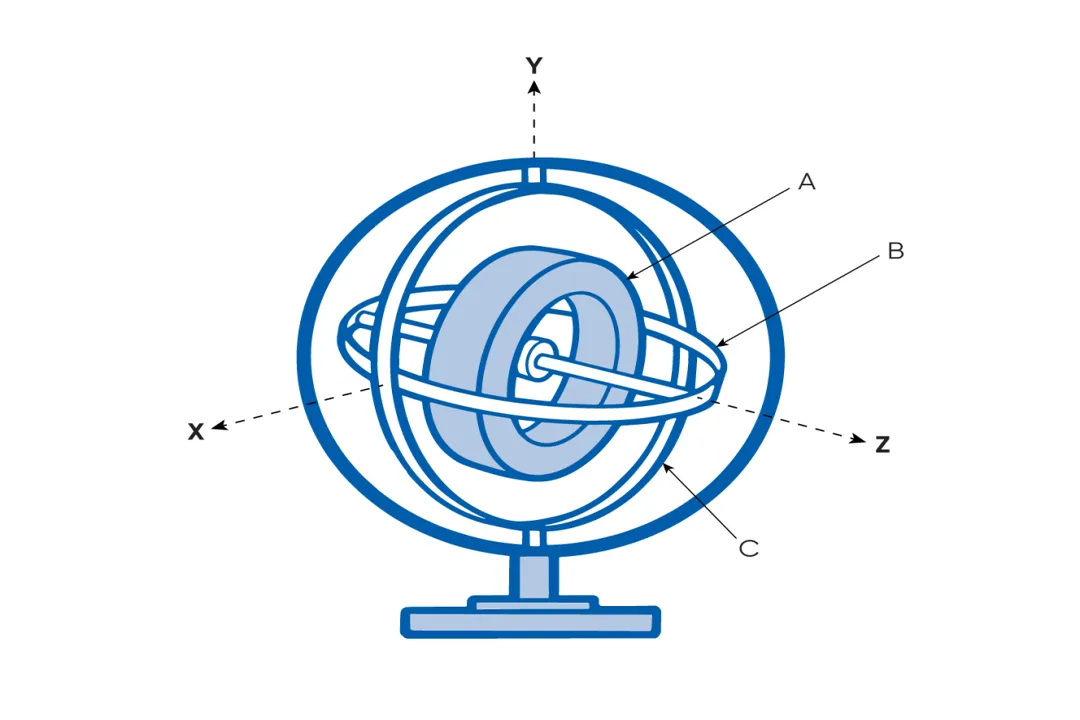
To properly observe and isolate the effects of the spin, inventors needed a way to manipulate the mounting without interfering with the spinning rotor itself. This necessity led to the introduction of the gimbal system, a concept that itself dates back several centuries BC. [2][3] A gimbal is essentially a series of pivoted frames allowing an object mounted on the innermost frame to maintain an orientation independent of the external support structure. [2]
In the classic mechanical gyroscope, the spinning wheel’s axle is fixed to the innermost gimbal ring. [2] This inner ring is mounted within an outer ring, and their pivot axes are set orthogonally (at a ninety-degree angle) to each other. [3] This configuration grants the rotor three degrees of rotational freedom relative to its fixed mount, meaning that even if the base frame is rotated or tilted in any direction, the spinning disc’s axis of rotation aims to remain fixed in its original spatial alignment. [2][3] This resistance to change in the axis of rotation is a direct manifestation of the conservation of angular momentum. [3] Faster spin equates to greater angular momentum, thus greater resistance to external torque. [3]
When an external force attempts to tilt the axis, the reaction is not a direct counter-force, but rather a torque that acts ninety degrees away from the applied force, causing the axis itself to slowly move in a circular path—a phenomenon known as gyroscopic precession. [2][3] This counterintuitive reaction is exactly what Foucault used to visualize the Earth’s daily rotation over the course of his experiment. [2]
# Industrial Birth
The transition from a laboratory demonstration to a reliable instrument required a source of power that could maintain the high rotation speed indefinitely, overcoming the natural slowing effect of bearing friction. [2] The mid-1860s brought the advent of the electric motor, making the sustained spin practical. [2]
The concept was then engineered for real-world utility. In 1895, Austrian inventor Ludwig Obry refined the design into a precision gimbaled instrument, known as the Obry apparatus. [4] This iteration proved immediately useful. By 1896, the Royal Navy adopted the Obry apparatus for use in torpedo guidance control. [4] This early adoption highlights a key driver in technological advancement: military necessity. The ability to guide a projectile accurately without relying on visual contact or easily jam-able radio signals was a massive strategic advantage during the late nineteenth-century naval buildup. [4] The immediate success in torpedoes spurred further application, with larger vessels soon exploring its use for roll stability and navigation. [4]
This military focus on stable orientation set the stage for a broader navigational revolution. By 1904, Hermann Anschütz-Kaempfe patented the functional gyrocompass, designed to align itself with true geographical North by sensing the Earth’s axis of rotation, thereby offering mariners a reliable, non-magnetic heading independent of terrestrial magnetic variations. [2][3] American Elmer Sperry quickly followed with his own design later that same year. [2] The military importance was not lost on major powers, leading to the rapid establishment of gyroscope industries worldwide. [2] This engineering refinement, aimed at keeping the gyroscope stable in one direction (North), rapidly transitioned to keeping a vehicle stable in all directions. By 1916, the Sperry Gyro Company had introduced the first gyro autopilot for aircraft. [4]

# Navigational Systems
The challenge then became using the perfect stability of the gyroscope as a reference point for measuring motion, rather than just maintaining direction. Early inventors tried unsuccessfully in the first decades of the 20th century to create stable platforms from which accurate acceleration measurements could be taken, bypassing the need for celestial navigation sightings. [2] This foundational concept—using a fixed reference plane in space to measure movement relative to it—is the bedrock of modern Inertial Navigation Systems (INS). [2][3] When GNSS (Global Navigation Satellite System) signals are lost, or for applications requiring high secrecy, the INS takes over using dead-reckoning, integrating the acceleration and rotation data provided by its internal sensors to estimate position. [3]
The gyroscope’s role in INS is to provide the angular velocity measurements (roll, pitch, and yaw) around its three axes. [1][3] The progression from mechanical alignment to autonomous capability shows a clear line of dependence. The successful development of guidance systems for ballistic missiles in later decades relied directly on the theoretical and engineering groundwork laid by the early gyrocompass pioneers. [2] It is difficult to imagine the scale of modern autonomous vehicles, space travel, or satellite guidance without this stable reference established over a century ago. [4]
# Modern Forms
While the conservation of momentum remains the immutable law governing the device, the construction has transformed radically in the modern technological age. [3] The relentless pursuit of lower cost, reduced size, and superior accuracy has pushed the technology away from purely mechanical spinning masses toward solid-state and optical solutions. [3]
The first major step in miniaturization occurred after World War II, driven by missile guidance needs, resulting in "midget gyroscopes" weighing less than three ounces. [2] However, the most significant departures from the classic gimbaled wheel involve abandoning mechanical rotation entirely:
- MEMS Gyroscopes: Emerging from microelectromechanical systems (MEMS) technology developed alongside integrated circuits in the 1960s, these are incredibly small and inexpensive. [3] They typically operate by oscillating a microscopic proof mass and detecting the resulting Coriolis effect (the apparent deflection caused by the Earth’s rotation) as a change in capacitance. [3] These are now standard in consumer electronics like smartphones. [1][3]
- Ring Laser Gyroscopes (RLG): First demonstrated in the early 1960s, RLGs use light traveling in opposite directions around a fixed triangular or square path (a resonant cavity). [3] Any rotation causes the path lengths to effectively change for the opposing beams, which is measured as a frequency difference via the Sagnac effect. [3] The Boeing 757-200 in 1983 was equipped with one of the first production RLGs, an invention fueled by competition with improving mechanical designs. [2]
- Fiber Optic Gyroscopes (FOG): Developed in the mid-1970s, FOGs are similar to RLGs but propagate the light through a long coil of optical fiber, allowing for a much longer path and often higher resolution. [3] They also rely on the Sagnac effect but have the advantage of no moving parts, eliminating friction-based drift errors common to mechanical systems. [3]
It is fascinating to consider that the ultimate expression of gyroscopic stability today might be found in devices where the only "spinning" component is a standing wave of light, or even in the London moment gyroscope used in the Gravity Probe B experiment. [2] This latter device uses a nearly-perfect sphere of fused quartz coated with superconducting material, magnetically suspended to eliminate all bearing friction. Its expected spin-down time, given zero drag, is estimated to be around 15,000 years. [2] This represents an extreme refinement of the rigidity in space concept first observed in simple toys—an object whose rotational alignment is meant to remain fixed relative to the distant stars for millennia, an engineering feat the earliest inventors could scarcely have imagined when watching their wooden tops wobble on the floor. [2] The modern requirement is not just to see the Earth rotate, but to measure deviations in orientation against a reference frame that is effectively as stable as the universe itself. [2]

# Practical Considerations Today
The choice among these technologies—mechanical, MEMS, FOG, or RLG—now depends entirely on the operational context. [3] For a consumer application like a smartphone, the low cost and small footprint of a MEMS unit suffice for basic orientation sensing. [3] For a deep-sea vehicle or a strategic aircraft, the lower drift and higher accuracy of an FOG or RLG, which can often perform gyrocompassing (finding true North without magnetic aid), become essential. [3] Furthermore, as systems move toward autonomy, the ability of a gyroscope to integrate acceleration data to calculate velocity and position via dead-reckoning remains critical for maintaining positional awareness when external satellite references are unavailable or intentionally denied. [3] From a simple spinning top to a quantum-level light wave sensing rotation, the gyroscope’s history is a clear pathway showing how pure scientific observation, when coupled with engineering refinement and a pressing practical need, leads to transformative technology. [2][3]
Related Questions
#Citations
Gyroscope - Wikipedia
Gyroscopes – From Humble Beginnings To Hyper Technology
The Origin and Evolution of the Gyroscope - Inertial Labs
Gyro History - Nu-Tek Aircraft Instruments
Gyroscope - Etymology, Origin & Meaning