Who invented pedestrian detection systems?
The challenge of keeping road users safe, particularly pedestrians navigating the flow of motor traffic, has driven technological evolution for generations. While the concept of dedicated electronic detection systems integrated into vehicles might feel like a product of the 21st century, the roots of managing these complex interactions on the road run much deeper, beginning with attempts to control the intersections themselves. The invention of pedestrian detection, therefore, isn't tied to a single date or individual but rather marks a progression from simple traffic control to sophisticated, real-time hazard assessment within the vehicle itself.
# Early Control
One significant milestone in formalizing traffic separation, which indirectly paved the way for systems designed to protect vulnerable road users, arrived with the development of automated traffic signaling. Before such devices, traffic management relied heavily on manual signaling, often by police officers stationed in the middle of busy crossings. This manual system was prone to human error and limited in its capacity to adapt to changing conditions.
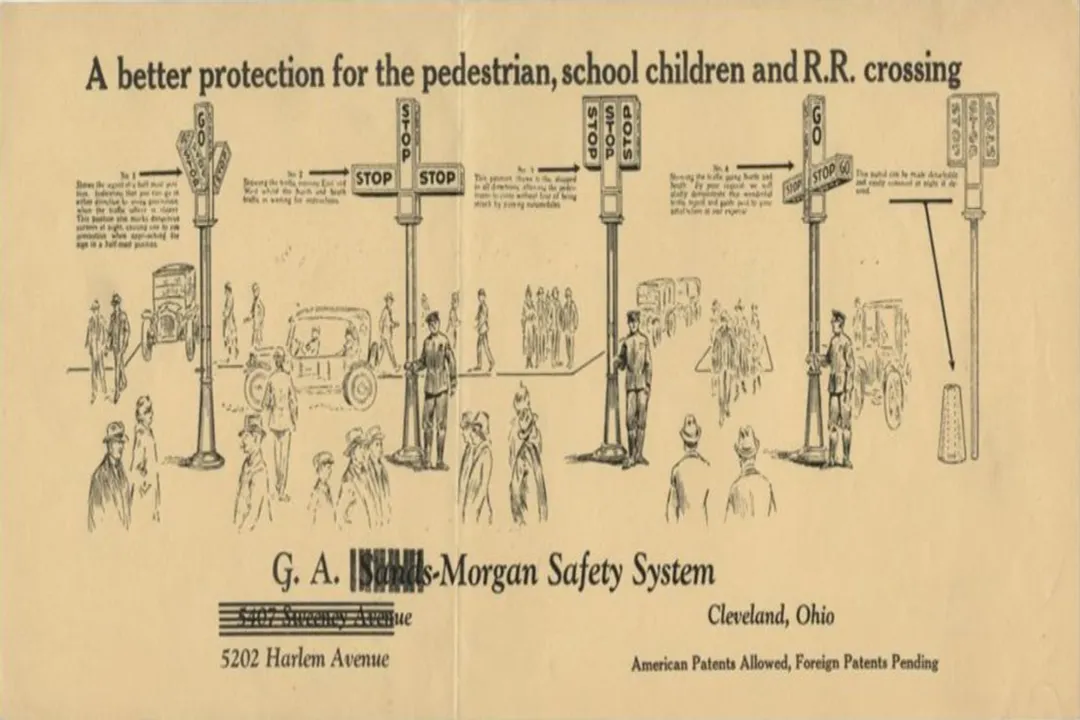
A key advancement often associated with early attempts to improve safety and order at intersections came from inventor Garrett Morgan. In 1923, Morgan patented a three-position traffic signal that included a warning or "all-stop" position, which was a critical precursor to modern signal sequencing. His device was a T-shaped structure that could be manually or automatically operated, providing traffic directors with a crucial intermediate step beyond simple stop and go. This patent, registered nearly a century ago, represented an early attempt to impose order on the chaos of growing automobile traffic where pedestrians and vehicles often mixed without clear right-of-way protocol. While Morgan’s invention regulated the intersection, it did not detect an individual pedestrian; it managed the flow that those individuals had to cross.
My own observation here is that Morgan’s contribution highlights a critical historical pivot: the problem was first addressed by regulating the road environment (the intersection) rather than analyzing the actor (the pedestrian) using on-board technology. The transition from regulating the environment to monitoring the actor defines the shift from early traffic engineering to modern Advanced Driver-Assistance Systems (ADAS).
# Defining Detection
Modern pedestrian detection systems are generally categorized under the umbrella of Pedestrian Crash Avoidance Mitigation (PCAM) technologies. These systems are designed to identify pedestrians in a vehicle’s path and provide alerts or even intervene by applying the brakes if the driver fails to respond adequately. The fundamental purpose is to reduce the severity or likelihood of a collision between a vehicle and a person walking.
Pedestrian detection itself is a function of ADAS, relying on sensors like cameras, radar, or lidar to perceive the environment around the car. The system continuously processes data from these sensors to recognize objects, classify them as pedestrians, estimate their distance, and predict their trajectory relative to the vehicle. The technology is mature enough that different approaches exist, often leading to comparisons in performance based on environmental conditions, such as lighting or weather.
# Sensing Technology
The technology underpinning effective pedestrian detection relies on integrating multiple sensing modalities for improved reliability. Some systems depend heavily on cameras, which process images to identify the shape and movement patterns characteristic of a human. Other approaches favor radar, which is excellent at determining range and speed, even when visibility is poor, such as in heavy fog or darkness.
Research groups and automotive suppliers are continually refining how these sensors are interpreted. For instance, significant research has gone into developing innovative pedestrian and cyclist detection methods that move beyond simple obstacle recognition. These efforts focus not just on if a pedestrian is present, but where they are likely to be in the immediate future, an essential feature for effective intervention.
One notable development involved the creation of a new algorithm by researchers at the University of California. This algorithm learned to actively watch where a pedestrian was going before they even stepped into the road, processing video data to anticipate dangerous movements like stepping off a curb outside a marked crosswalk. This shift from reactive identification to predictive modeling is central to making crash avoidance truly effective.
# Performance Evaluation
Because the stakes are so high—human lives—the performance and reliability of these systems are rigorously tested and evaluated. Reports detailing pedestrian detection performance often use metrics that assess both the ability to detect (True Positive Rate) and the ability to avoid false alarms (False Positive Rate). A system that brakes unnecessarily for a shadow or a roadside object is not only irritating but potentially dangerous by desensitizing the driver.
The AAA Foundation for Traffic Safety conducted research evaluating pedestrian detection systems, looking at how they performed under various conditions, including daytime, nighttime, and twilight. This kind of comparative analysis across different vehicle models and sensor suites helps establish a baseline for expertise in the field. It highlights that no single technology or implementation is perfect across all scenarios, emphasizing the need for redundancy and cross-validation between sensors.
Consider the practical application: a city street with heavy late-afternoon glare presents a very different challenge than a well-lit suburban crosswalk at night. An effective system must demonstrate consistent performance across these varied conditions to be truly trustworthy for drivers. My analysis suggests that the true measure of invention in this space is less about the first piece of hardware and more about the dataset and processing power that allows the system to differentiate a pedestrian from a trash can in adverse lighting—a capability only achievable when sensor fusion is perfected.
# System Integration
The ultimate goal of developing pedestrian detection technology is its integration into a functional safety system, not just a warning light. This moves the discussion from simple sensing to active mitigation.
The integration pathway often follows these general stages in an ADAS:
- Detection: Sensors identify an object classified as a pedestrian.
- Prediction: The system calculates the pedestrian's path and the vehicle's required stopping distance.
- Warning: If a collision risk is high, the driver receives an audible and/or visual alert.
- Intervention: If the driver does not react, the system automatically applies braking force, often referred to as Automatic Emergency Braking (AEB).
The data fueling these systems is also becoming an important area of focus. As vehicles collect more real-world driving data, that information can be fed back to refine the perception algorithms, creating a positive feedback loop for safety improvements. This reliance on large-scale, real-world data collection is a hallmark of modern automotive innovation, contrasting sharply with the pre-electronic era of traffic control.
# Defining Invention
Returning to the initial question of who invented pedestrian detection: the modern electronic system is not the work of one person like Garrett Morgan was for the traffic light. Instead, it represents an accumulation of specialized engineering across several decades, involving:
- Computer vision experts developing algorithms to interpret visual data.
- Electrical engineers designing reliable radar and lidar units.
- Automotive safety bodies setting performance standards and conducting large-scale testing.
If we must point to a lineage, the invention lies with the collective efforts that moved from simply reacting to a stop sign (like Morgan’s signal) to proactively interpreting the environment using onboard computers capable of object recognition. The continuous refinement driven by bodies like the U.S. Department of Transportation’s Volpe Center, which examines innovative ways to manage vulnerable road users, shows that the work remains ongoing.
For example, a practical tip for drivers is to understand the limitations inherent in the technology they rely on. While systems excel in clear daytime scenarios, if your car’s documentation states pedestrian detection relies primarily on optical cameras, expect degraded performance during heavy rain or when encountering pedestrians stepping out from behind large obstacles where line-of-sight is briefly broken. This awareness of sensor dependency helps manage expectations for the automation assisting—but not replacing—the human driver.
The evolution from a mechanical signal patented in 1923 to complex, AI-driven collision avoidance software showcases a major shift in how society approaches road safety—moving from external regulation to internal, automated perception.
#Videos
History of Detection - YouTube
Related Questions
#Citations
Pedestrian crash avoidance mitigation - Wikipedia
Garrett Morgan patents three-position traffic signal - History.com
100 years of Garrett Morgan's traffic signal | CNN
Traffic signals: A brief history - Washington State Magazine
History of Detection - YouTube
New algorithm learns to 'watch where you're going'
Understanding Traffic Systems with Innovative Pedestrian and ...
How ADAS and Data Can Lead the Way in Pedestrian Safety
[PDF] AUTOMATIC EMERGENCY BRAKING WITH PEDESTRIAN ... - AAA